Further details about curent research can be found at Matsuno Lab, Kyoto University .
Surgical Manipulator Design
This project aims to develop a novel robotic manipulator for surgical applications. The robotic manipulator with a master device is supposed to improve surgical outcomes using haptics (kinesthetic feedback) and intelligent remote center of motion mechanism design.
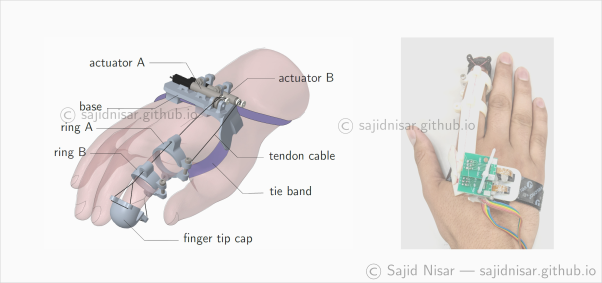
Wearable Haptic Device Design
This project developed a wearable kinesthetic device with Prof. Allison Okamura at CHARML Lab, Stanford University. The device provides haptic feedback in two directions. We conducted psychophysical experiments to study the effects of different hand-grounding locations on user haptic performance and experience.
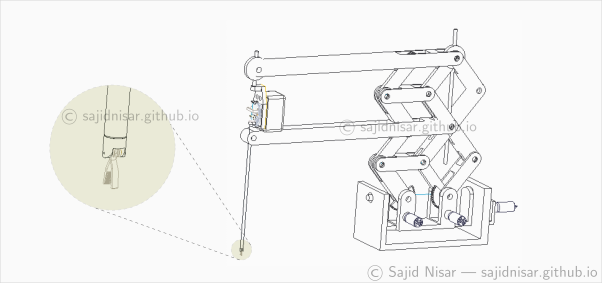
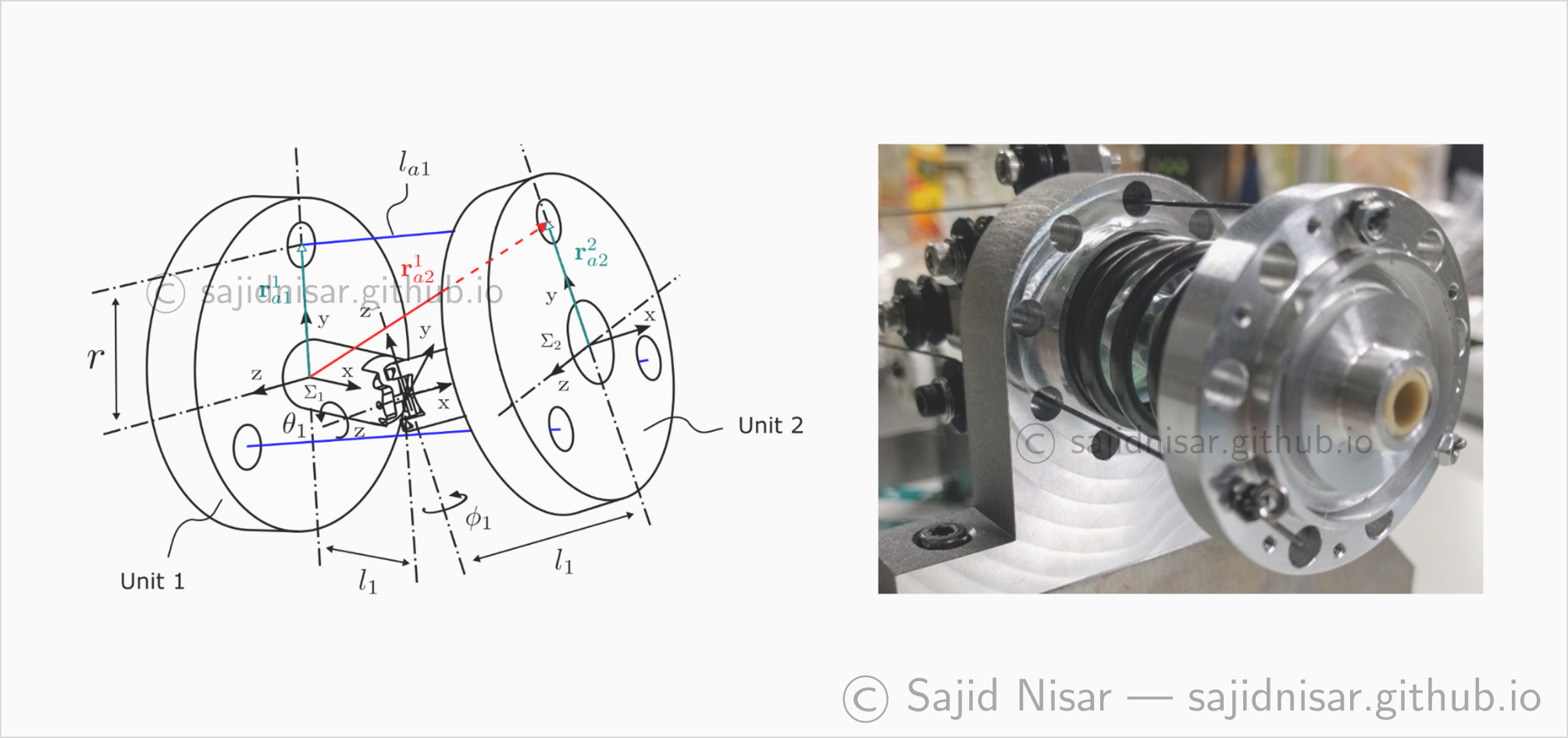
RCM Mechanism Design
We proposed a new remote center of motion mechanism which, contrary to the majority of existing planar designs, offers pitch and translation movements through its mechanism design.
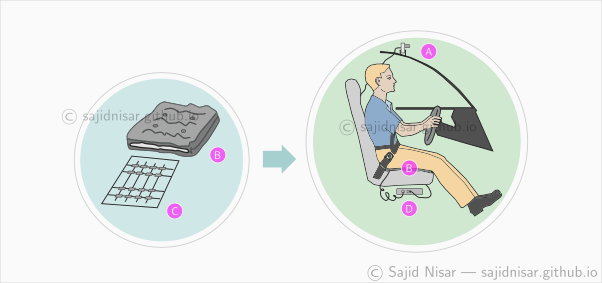
Haptic Cushion for Driving Assistance
A novel haptic cushion for automobile driving-assistance is developed. The plug-and-play solution provides vibrotactile feedback to drivers on traffic lights and road intersections. The aim is to reduce waiting time, fuel consumption and improve vehicle flow at intersections and traffic lights.
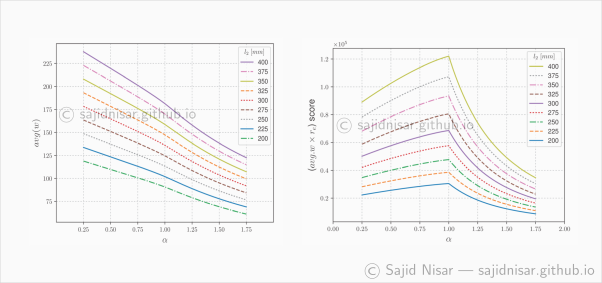
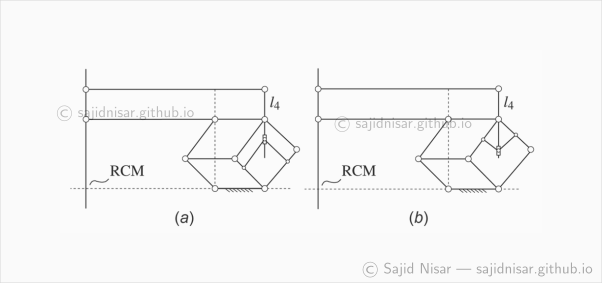
Kinematic Design Optimization
This study was focused on the kinematic optimization of the remote center of motion mechanism design to achieve maximum kinematic performance characterized by the mechanism manipulability and tool translation ability.
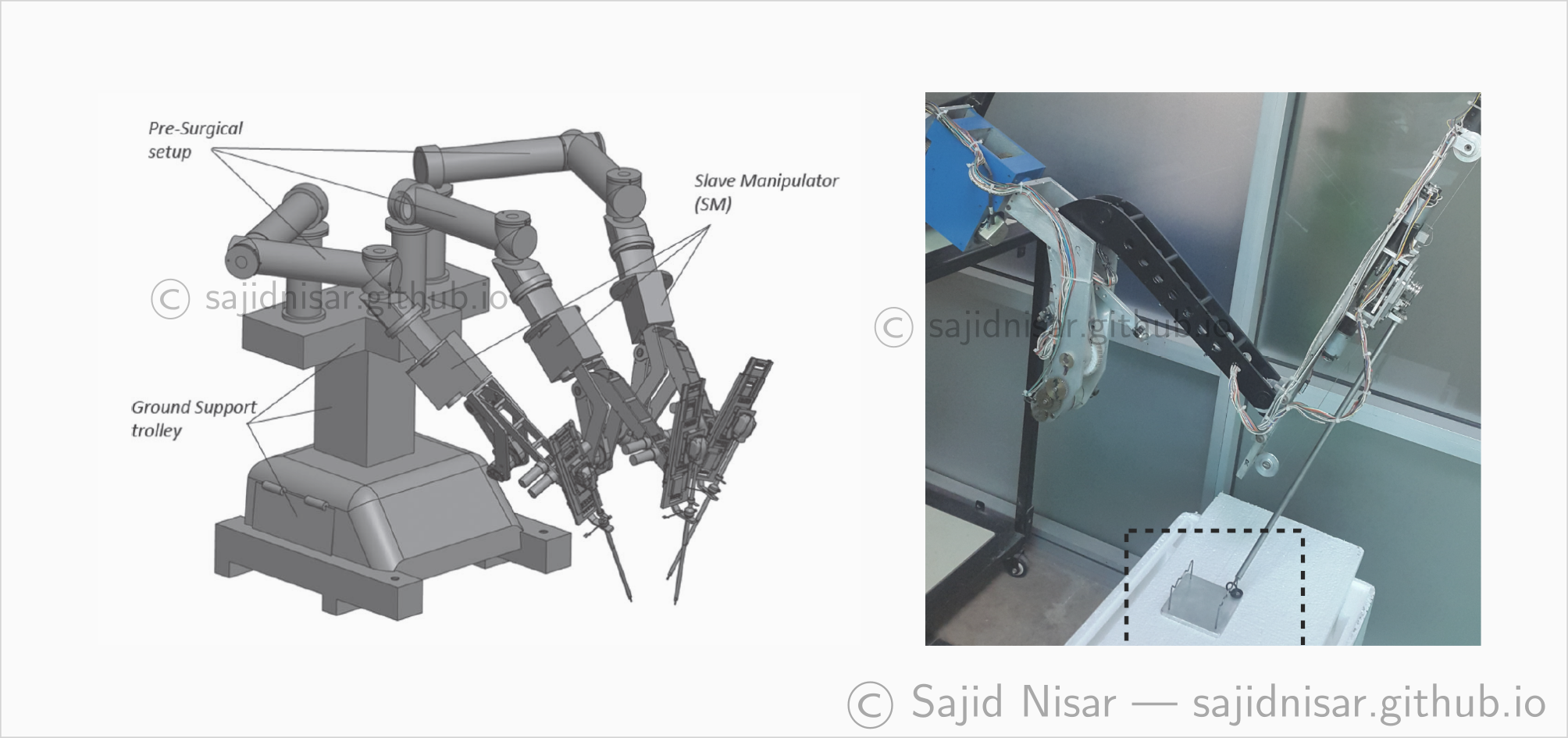
Al-Zahrawi Surgical Robot
This project designed and realized a robotic system for surgical applications and training of young surgeons for robotic laparoscopy. The master-slave system provided dexterous tool manipulation capabilities with tremor filtering.
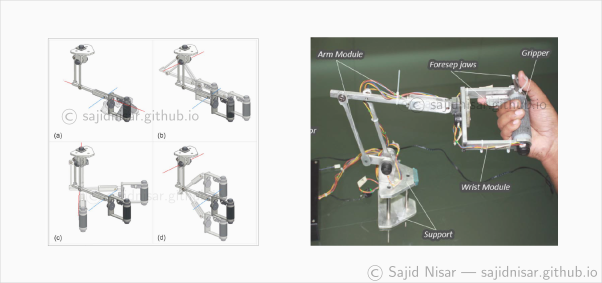
Hand Manipulator for Surgical Training
A passive manipulator device was developed to provide an interface identical to manual tools in Minimally Invasive Surgery. The patent device design was used with SOFA-based virtual environment for MIS training.
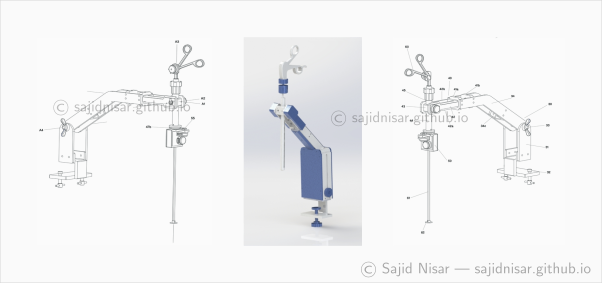
Master Manipulator for a Surgical Robot
A 6-DoF master manipulator device was realized to control a slave surgical robot. Two master manipulator devices are held by a user to perform tasks such as grasping, manipulation, cutting and needle-driving in Minimally Invasive Surgery.
Tendon-driven Multi-DoF Snake Arm
In this industry project, we developed a tendon-driven multi degree-of-freedom snake manipulator for maintenance and exploration purposes. The novelty of the proposed design is that, with other spatial movement directions, it can shrink or extend its length as well.
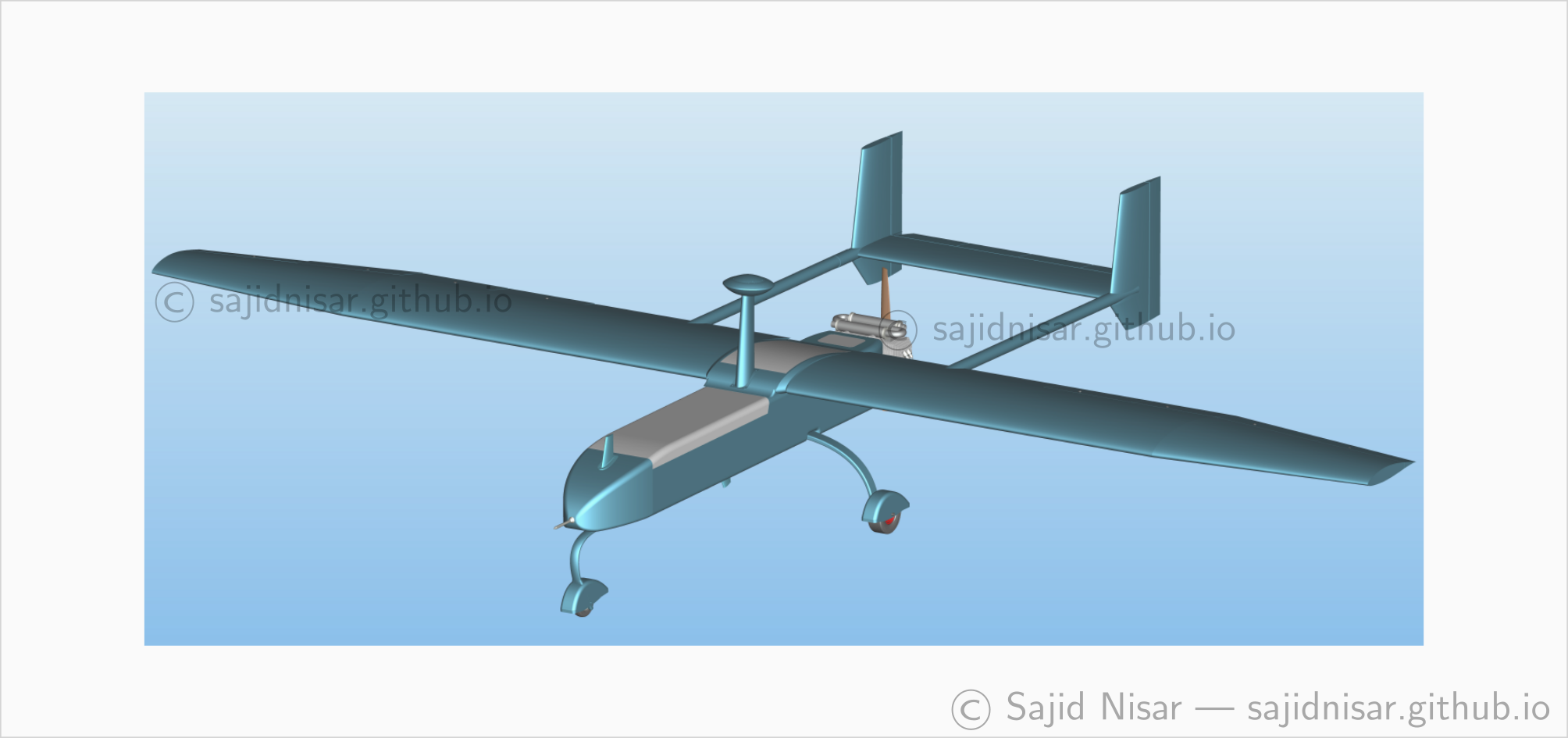
Unmanned Aerial Vehicle Design
I was part of team which designed and developed three different short, mid and long-range aerial drones. I mainly worked on the fuselauge composite-fabrication and landing-gear mechanism design.
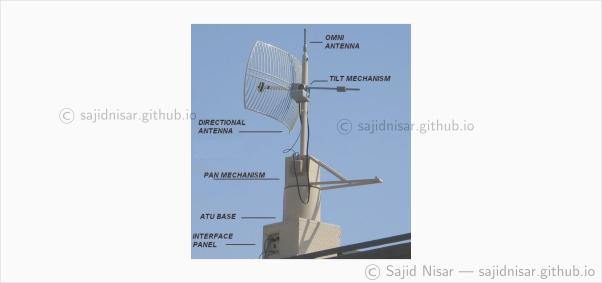
Ground Control Station for UAV's
Ground Control Station assembly and dish-rotation mechanism for UAV communication and control was designed and realized.